My Project
Race To The Future: selfdriving RC car
For the 'Race to the Future' project, our Digital Innovation class was divided into two teams, each tasked with developing an autonomous RC car. The objective was to design a self-built car capable of navigating a track entirely on its own. Success in the race was not solely determined by speed; the car had to demonstrate precision in avoiding obstacles and accurately following the track. This challenge required a combination of hardware innovation, software development, and strategic problem-solving.
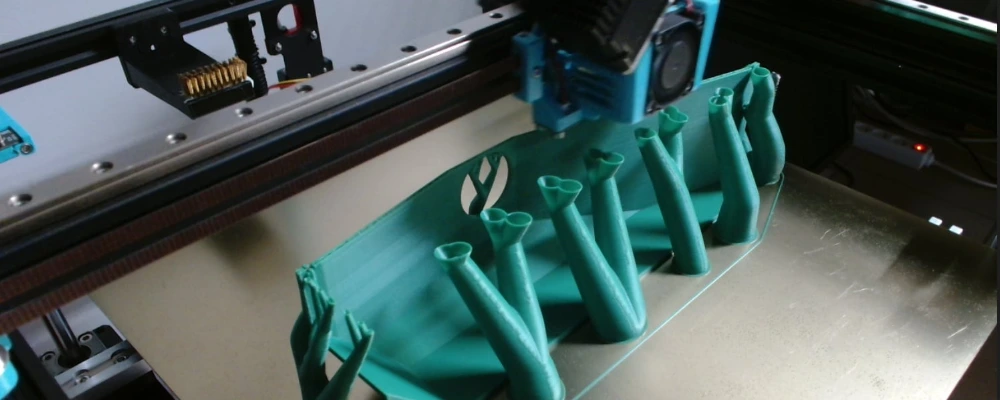
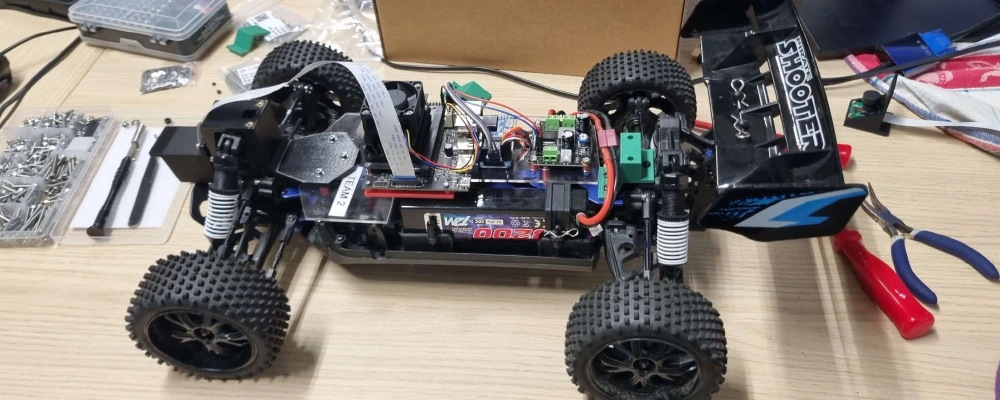
To achieve autonomous navigation, our team equipped the RC car with advanced functionalities. A camera was used as the primary sensor, enabling the car to perceive and respond to its surroundings. To enhance vision capabilities, we incorporated a wide-angle lens, expanding the field of view for better track detection. Additionally, we designed a custom 3D-printed chassis to provide a stable and efficient structure for the necessary hardware components. These elements formed the foundation for our car's ability to operate independently on the track.
The development process relied on the Donkeycar library, an open-source platform for self-driving vehicles. We installed this software on a Jetson Nano, a powerful edge computing device, which served as the car’s central processing unit. The initial phase involved manually driving the car around the track to collect training data. This dataset was then used to train an AI model utilizing TensorFlow and Keras, enabling the car to make autonomous decisions based on real-time visual input.
Our programming was entirely based in Python, with OpenCV playing a crucial role in image processing. The synergy between hardware and software allowed our vehicle to recognize and adapt to obstacles efficiently. A key decision in our development process was the addition of a wide-angle lens to the camera, which significantly improved track recognition. This enhancement ensured that the car could detect upcoming turns and obstacles more accurately, leading to better navigation and faster reaction times.
In the end, our strategic approach paid off, as our team secured victory in the competition. The combination of a well-trained AI model, optimized hardware, and a robust 3D-printed chassis proved to be the winning formula. This project provided invaluable experience in integrating artificial intelligence with hardware, emphasizing the importance of data analysis, teamwork, and continuous innovation. The success of our autonomous car offered an exciting glimpse into the potential of AI-driven mobility solutions and further solidified our skills in the field of digital innovation.